[컨볼루션] Depthwise separable convolution
* 본 내용은 공부 정리용으로 작성된 것이며 오류가 있을 수 있습니다.
Nomal Convolution
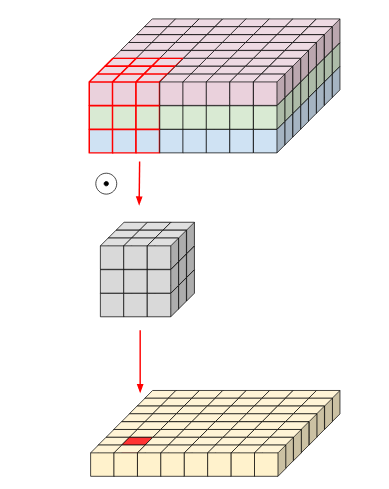
기존 convolution에서 연산량은 아래와 같다. (K = 필터크기, N = 출력채널크기, Iw, Ih = 입력크기, M = 입력채널크기)
$$ K^{2}MNI_{w}I_{h} $$
따라서 위의 예제의 연산량은 $ 3^2*N*3*8*8 = 1,728N $ (N=1)이다.
이렇게 출력 채널이 작아지는 경우도 있지만, 특성지도를 더 늘리기 위해 채널의 수를 늘리는 경우도 있다. (N>1인 경우)
N을 다른 방식으로 처리해서 기존 방식보다 곱셈연산을 줄인 방식이 아래에 나와있다.
Dept-wise convolution
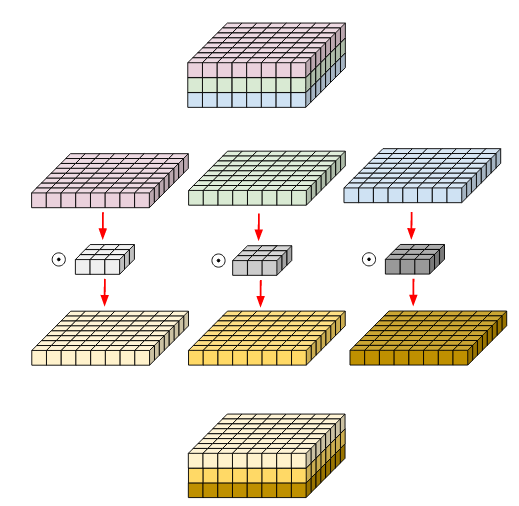
Depth-wise convolution은 채널을 분리해서 컨볼루션 연산을 적용한 뒤, 다시 합치는 방식이다.
이렇게 하면, 곱셈의 양이 줄어든다.
기존 convolution에서 연산량은 아래와 같다. (K = 필터크기, Iw, Ih = 입력크기, M = 입력채널크기)
$$ K^{2}MI_{w}I_{h} $$
따라서 위의 예제의 연산량은 $ 3^{2}*3*8*8 = 1,728$이다.
Depth-wise convolution을 수행 한 후, N을 그 다음에 처리한다.
Point-wise convolution
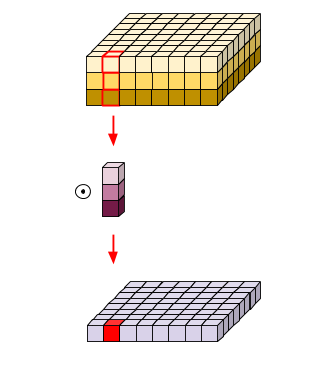
각각 따로 convolution을 수행한 결과들을 채널이 N인 결과로 바꿔야 한다.
여기서는 공간은 처리하지 않고 채널만 처리한다.
Point-wise convolution의 연산량은 다음과 같다. (Iw, Ih = 입력크기, N = 출력 채널의 크기, M = 입력채널크기)
$$ NMI_{w}I_{h} $$
위의 예제의 연산량은 $ N*3*8*8 = 192N$(N=1) 이다.
Depth-wise separable convolution
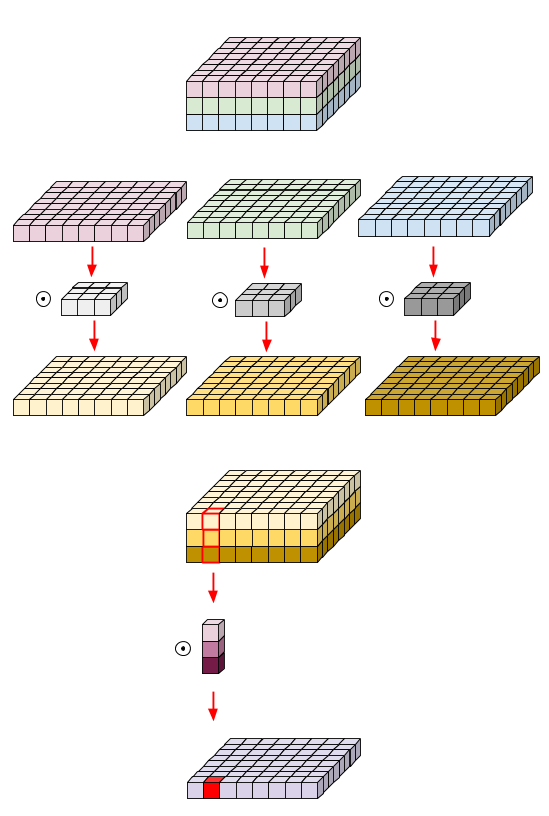
이러한 일련의 과정을 거친 것이 Depth-wise separable convolution 이다.
공간영역에 conv를 적용한 뒤, 채널영역에 conv를 적용한다는 것이 이 방식의 핵심이다.
총 연산량은 아래와 같다. (K = 필터크기, N = 출력채널크기, Iw, Ih = 입력크기, M = 입력채널크기)
$$ K^{2}MI_{w}I_{h} + NMI_{w}I_{h} $$
위의 예제에서는 $ 3^{2}*3*8*8 + N*3*8*8 = 1,728 + 192N$(N=1) 이다.
기존의 Convolution과 비교하면 얼마나 연산량이 줄었을까?
$1,728N$ vs $1,728 + 192N$
N 즉, 출력채널이 커질 수록 Depth-wise separable convolution이 훨씬 빠르다.
하지만 이 방법도 만능은 아니다. 이렇게 하면 각 특성간의 컨볼루션 연산이 잘 이루어지지 않기 때문이다.
또한, K, 필터크기가 아무리 커봤자 5x5 정도 밖에 안되기 때문에 N, 출력채널크기에 따라 연산량이 좌우된다.
따라서, 경량화를 했다고 하지만, 출력 채널크기를 많이 늘릴 수는 없을 것이다.